The KUKA-KRL-Toolbox enables the usage of Scientific and technical Computation Environments (SCEs) like Matlab® or Scilab for robot control programming. Figure 1 shows the extension of the KUKA environment by adding a PC including Matlab or Scilab.
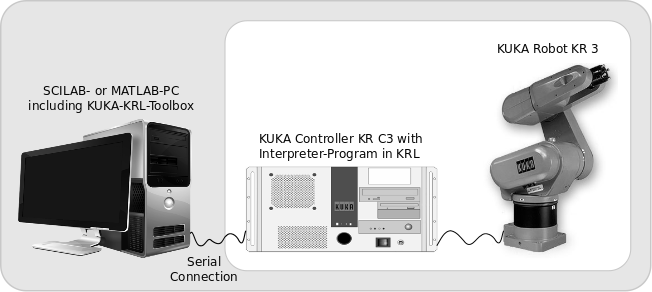
Fig. 1: Integration of PC including Matlab® or Scilab into KUKA environment
The KUKA controller is connected with the PC via serial interface. Subsequently, an interpreter was implemented in KRL to realise a bi-directional communication. The interpreter runs on the KUKA controller and is responsible for the identification and execution of commands that are transmitted by the PC. The control program is developed using Matlab or Scilab on the basis of the KUKA-KRL-Toolbox. Hence it runs on the PC.