Einleitung
Diese Online-Dokumentation ist unter der Zielstellung entstanden, die Funktionsweise der KUKA-KRL-Toolbox zur Steuerung eines KUKA-Roboters zu erläutern. Die Dokumentation ist durch Registerkarten in sieben Themenkomplexe unterteilt. Informationen zur Installation der KUKA-KRL-Toolbox werden in der Registerkarte Installation zur Verfügung gestellt. Nähere Erläuterungen zur Roboterbewegungsprogrammierung enthalten die Registerkarten PTP, LIN und CIRC. Die Registerkarte SET/INFO gibt einen Überblick über wichtige Konfigurationsbefehle (set-Befehle) und Informationsbefehle (info-Befehle). Eine detaillierte Zusammenstellung aller in der Toolbox enthaltenden Befehle beinhaltet die Registerkarte Function Reference.
WICHTIG: Für den Zugriff auf die Registerkarte Function Reference benötigen Sie ein shockwave flash Webbrowserplugin.
Die Toolbox ist eng an die KRL (KUKA Robot Language) gebunden. Detaillierte Informationen, die über den Inhalt dieser Online-Dokumentation hinausgehen, können vorzugsweise dem KUKA-Manual: Programmierung Experte entnommen werden. Die KUKA-KRL-Toolbox wurde bisher an einem KUKA KR3 und einem KUKA KR16 Roboter erfolgreich in Betrieb genommen.
Funktionsweise
Die KUKA-KRL-Toolbox ermöglicht die Steuerungsprogrammierung eines KUKA-Roboters unter Zuhilfenahme von SCEs (Scientific and technical Computation Environments), wie z.B. Matlab® oder Scilab. Die Abbildung 1 veranschaulicht die Erweiterung der KUKA-Standardkomponenten um einen zusätzlichen PC.
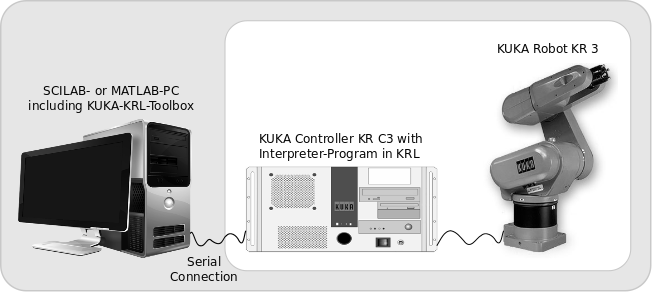
Abb. 1: Integration eines Matlab®- bzw. Scilab-PC in KUKA-Umgebung
Die on-line Anbindung des PCs an den KUKA Controller erfolgt über eine serielle Schnittstelle. Für die bidirektionale Kommunikation zwischen dem KUKA Controller und dem Matlab® bzw. Scilab PC wurde eine KUKA-KRL-Toolbox und mit der KRL ein Interpreter implementiert. Der Interpreter läuft auf dem KUKA Controller. Das eigentliche Steuerungsprogramm läuft auf dem Matlab® bzw. Scilab PC und wird unter Verwendung der KUKA-KRL-Toolbox entwickelt.