Der Installationsprozess beginnt mit der Konfiguration des Interpreter-Programms innerhalb der Matlab-Umgebung. Das Interpreter-Programm läuft anschließend auf dem KUKA Controller und ist für die Identifikation und Ausführung von Anweisungen verantwortlich, die vom PC gesendet werden.
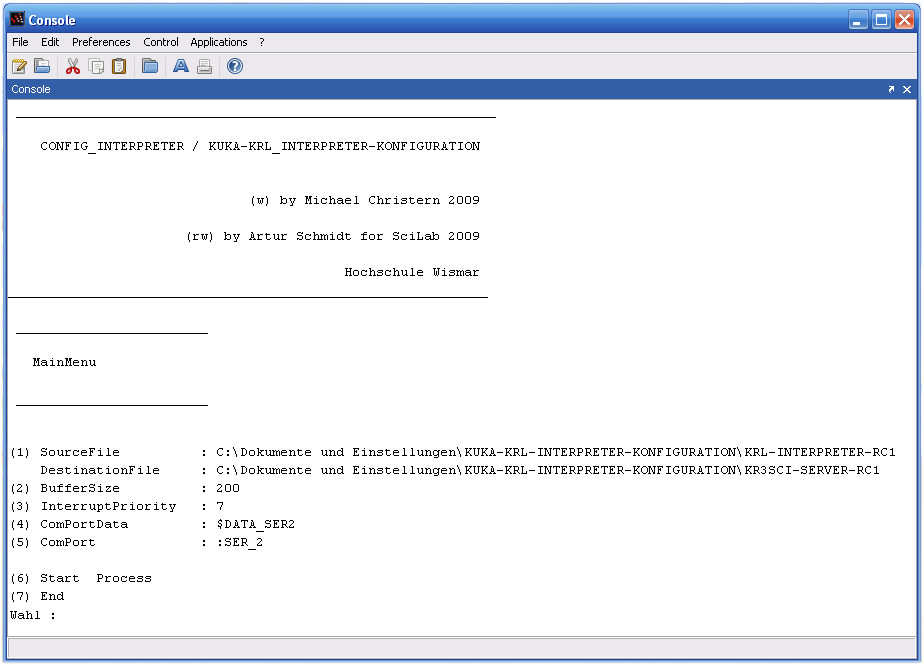
- Wechseln Sie in das Verzeichnis KUKA-KRL-INTERPRETER-KONFIGURATION und führen Sie anschließend die m-Function CONFIG_INTERPRETER.m aus.
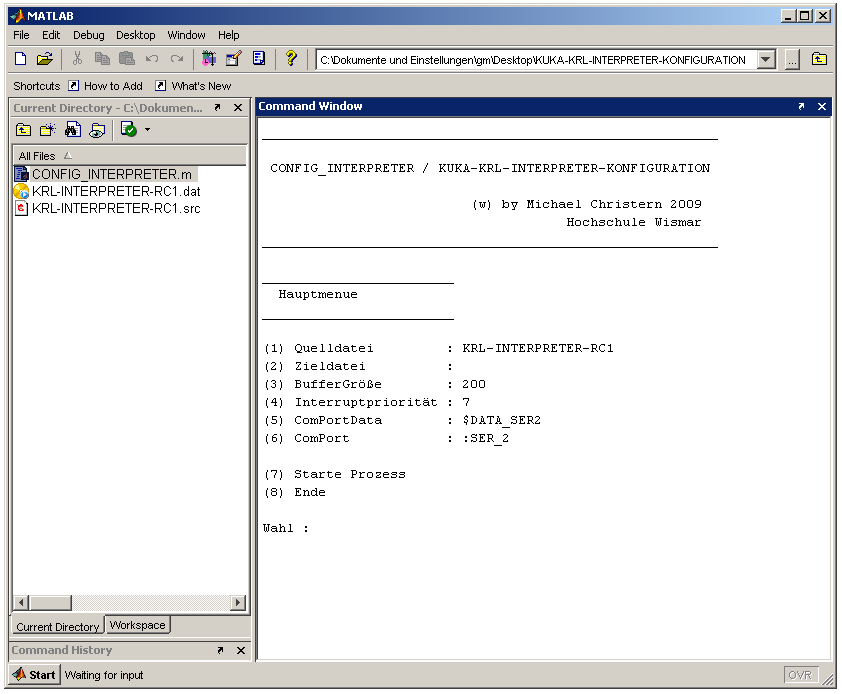
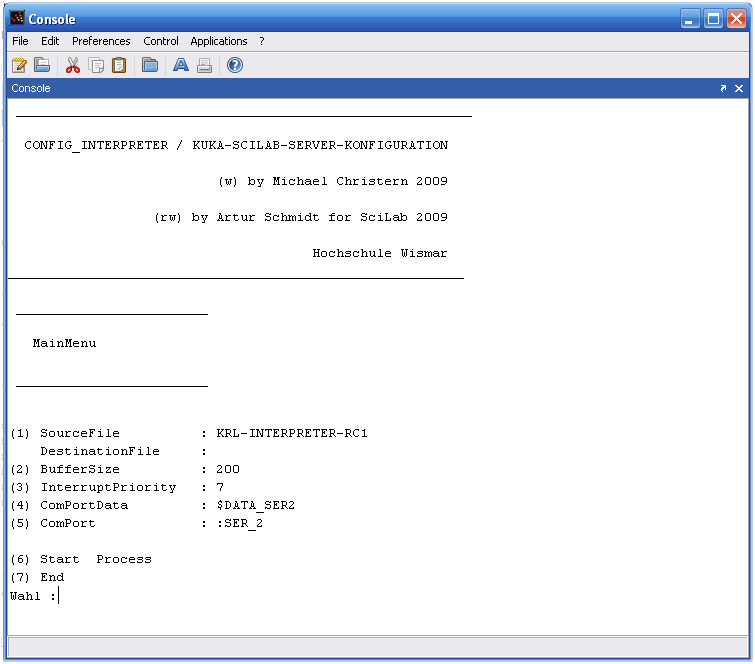
- Nutzen Sie die Option (5) und (6), um den ComPort für die serielle Kommunikation zu konfigurieren. Detaillierte Informationen bzgl. des Schnittstellennamens (Standard :SER_2) und der zugehörigen Datensystemvariablen (Standard $DATA_SER2) entnehmen Sie bitte dem KUKA-Manual: "CREAD CWRITE". Ändern Sie gegebenenfalls die Interrupt-Priorität über die Option (4).
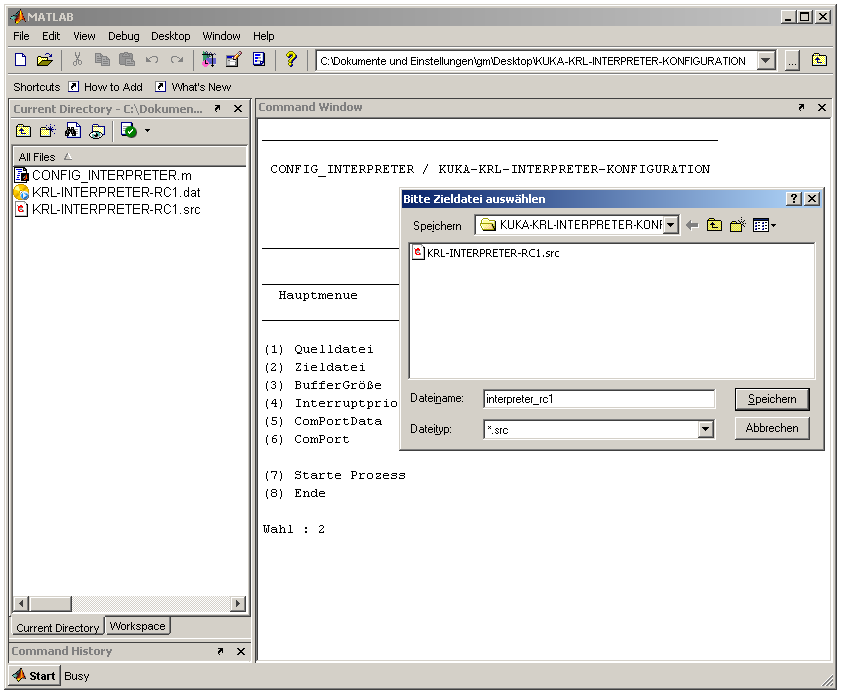
- Definieren Sie mittels Option (2) einen Dateinamen für die Zieldatei.
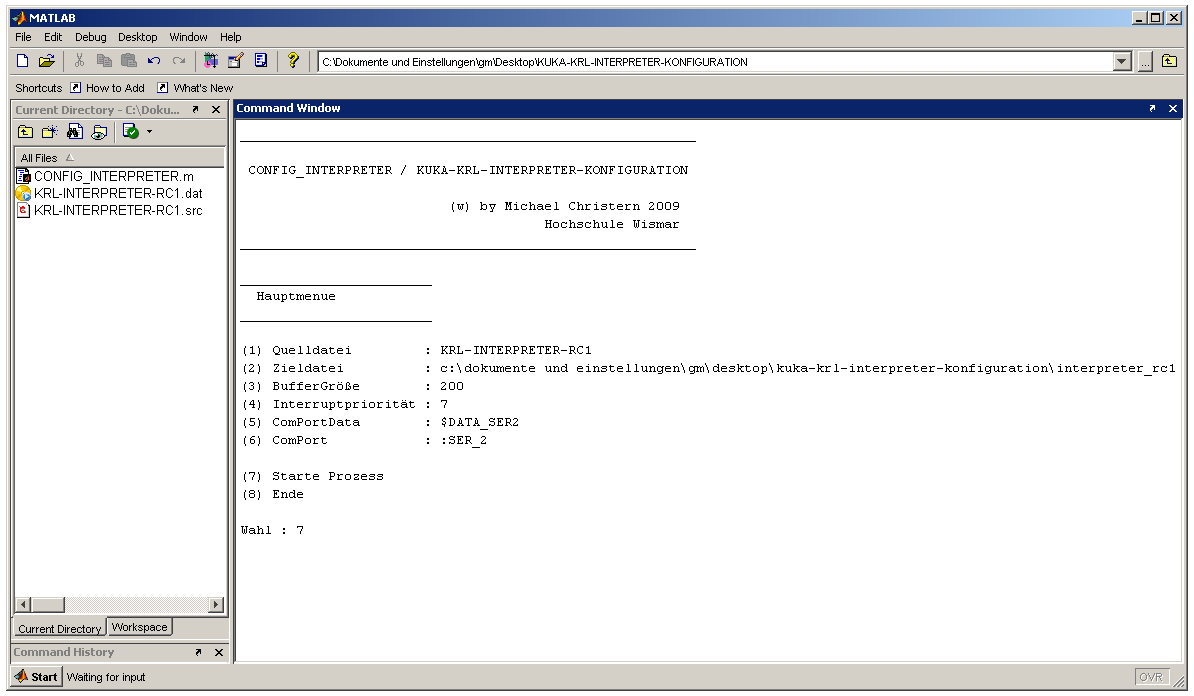
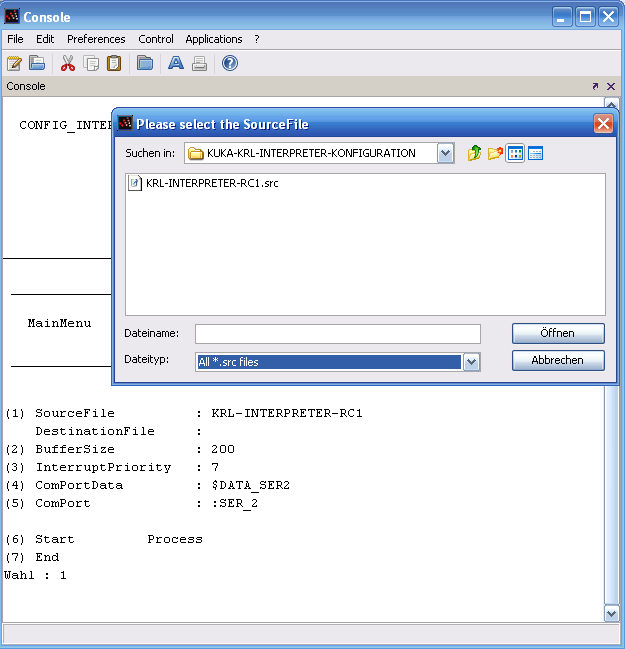
- Anschließend starten Sie mittels Option (7) den Konfigurationsprozess. In der Quelldatei KRL-INTERPRETER-RC1 werden nun die "Platzhaltervariablen" für BufferGöße, Interruptpriorität, ComPortData, ComPort durch die zugewiesenen Größen ersetzt und in die Zieldatei geschrieben.
- In Ihrem aktuellen Matlab-Verzeichnis sind nun zwei zusätzliche Dateien: interpreter_rc1.dat, interpreter_rc1.src hinzugefügt worden. Abschließend beenden Sie den Konfigurationsprozess mit der Option (8).
- Die Dateien interpreter_rc1.dat, interpreter_rc1.src bilden ein KRL-Modul und können als Interpreter-Programm auf dem KUKA-Controller (KRC) in Betrieb genommen werden. Kopieren Sie die beiden Dateien zunächst auf einen Wechseldatenträger.
- Schalten Sie Ihren KUKA-Controller ein und starten Sie die KUKA-Programmieroberfläche (Standardsoftware KR C). Welchseln Sie in die Benutzergruppe Experte. Im Anschluß legen Sie einen Ordner mit dem Namen des Interpreter-Programms interpreter_rc1 an. Kopieren Sie die Dateien interpreter_rc1.dat, interpreter_rc1.src vom Wechseldatenträger in diesen Ordner.
WICHTIG: Der Kopiervorgang muss in der KUKA-Programmieroberfläche ausgeführt werden. - Nun können Sie die *.src-Datei: interpreter_rc1.src anwählen. Starten Sie den Interpreter mit der Programmablaufart GO, d.h. alle Anweisungen werden ohne STOP bis zum Programmende bearbeitet. Das Interpreter-Programm ist nun bereit, Anweisungen vom Matlab-PC zu empfangen.