Installing KUKA-KRL-Toolbox
Contents
Necessary Preparations
Before starting the KUKA-KRL-Tbx installation, please prepare the integration of your additional PC into KUKA environment. Therefore you have to connect your PC to the KUKA-Controller via serial interface (RS232). Use a crossover cable for this connection. Please read the KUKA manual: "CREAD CWRITE" to configure the ComPort on your KUKA-Controller.
KUKA-KRL-Tbx-Installation Matlab®
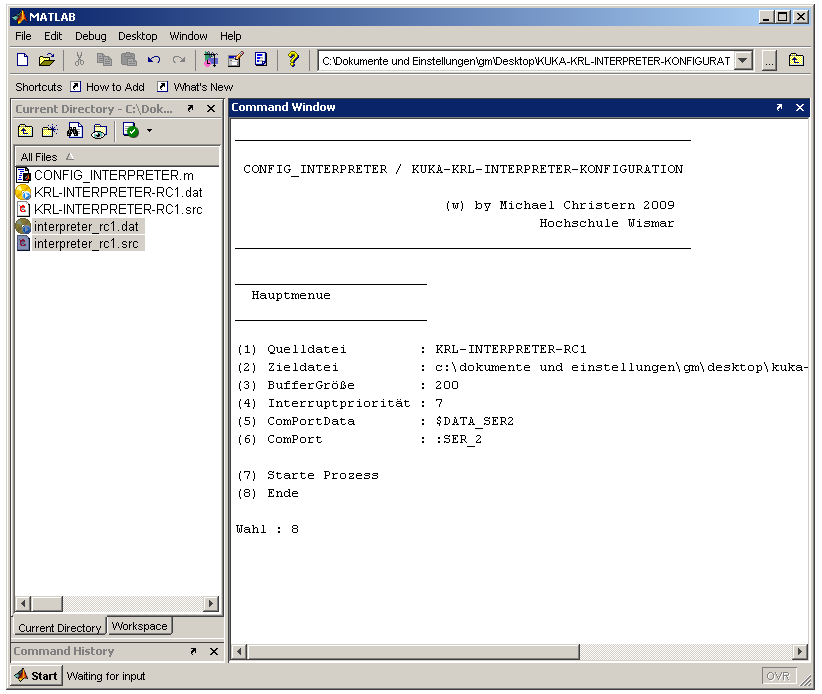
The process of installation starts with the configuration of the Interpreter-Program within the Matlab environment. The Interpreter-Program will run on the KUKA-Controller later on. It is responsible for the identification and execution of commands that are transmitted by the PC.
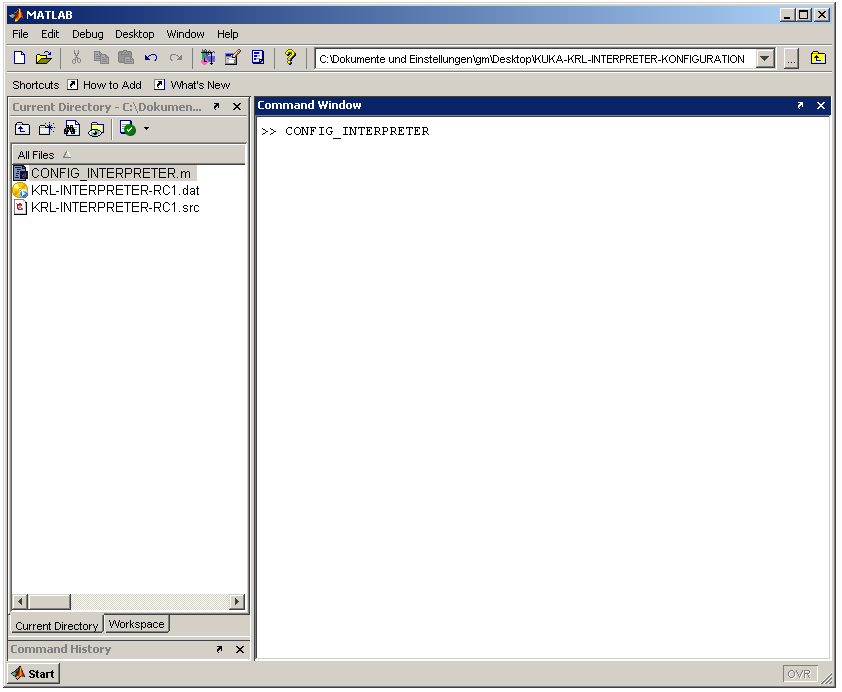
- Change to the directory KUKA-KRL-INTERPRETER-KONFIGURATION and execute the m-Function CONFIG_INTERPRETER.m.
- Use the options (5) and (6), to configure the ComPort for serial communication. For detailed informationen concerning the interface name (default :SER_2) and the related data-parameter (default $DATA_SER2) please refer to the KUKA-manual: "CREAD CWRITE". Change the interrupt-priority by option (4), if applicable. (By the way, you can choose an option by typing the related number into the command line.)
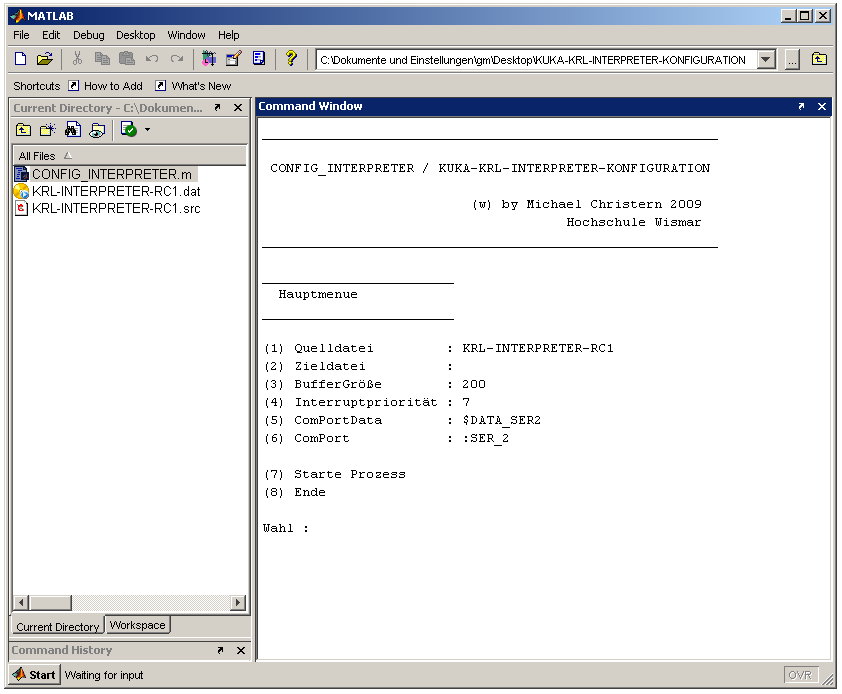
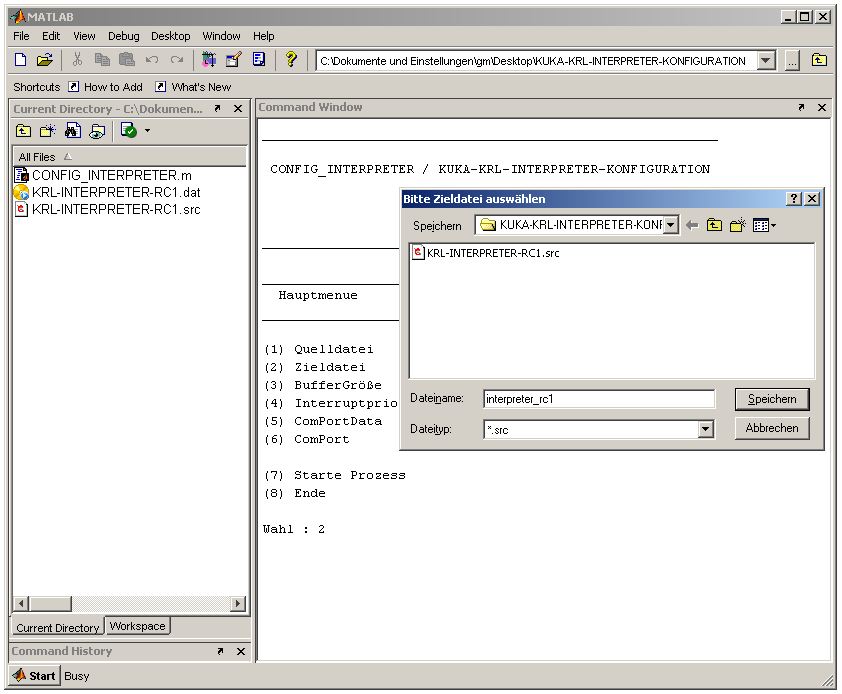
- Define a filename by option (2) for the destination file.
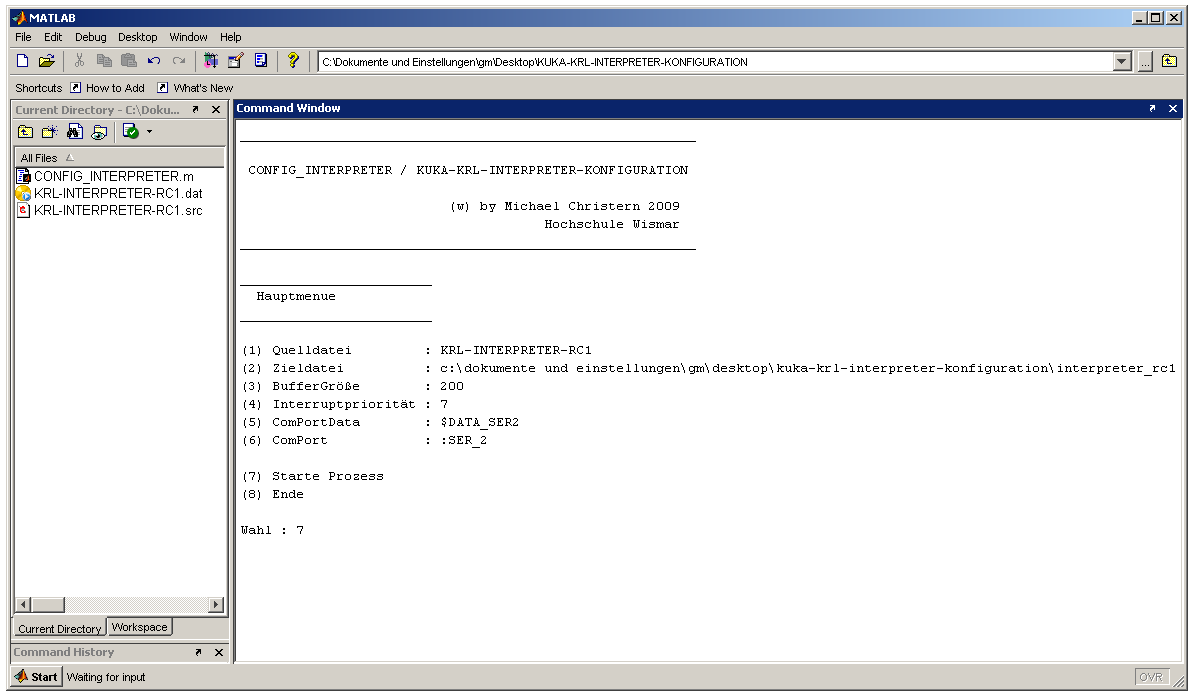
- Subsequently, you can start the process of configuration by option (7). The "placeholder variables" for BufferSize, InterruptPriority, ComPortData, ComPort in the source file KRL-INTERPRETER-RC1 are replaced by the reassigned values and are written to the destination file afterwards.
- Now there are two additional files in your current matlab directory: interpreter_rc1.dat, interpreter_rc1.src in this case. Finally you terminate the process of configuration by option (8).
- The files interpreter_rc1.dat, interpreter_rc1.src form a "KRL module", that is used as Interpreter-Program. Subsequently this Interpreter-Program is commissioned on the KUKA-Controller (KRC). Therefore copy both files on a storage device.
- Switch on the the KUKA-Controller and start the KUKA programming environment (standard software KR C). Change to the user group Expert. Create a folder with the name of Interpreter-Program interpreter_rc1. Copy the files interpreter_rc1.dat, interpreter_rc1.src from the storage device into this folder.
NOTE: The copy process has to be executed within the KUKA programming environment.
- "Select" the *.src-Datei: interpreter_rc1.src. Start the Interpreter-Program in the execution mode "GO", that means all program statements are executed until the end of program is reached, without stopping. Now the Interpreter-Program is ready to receive instructions from Matlab-PC.
Operation-Test Matlab®
- After commissioning the Interpreter-Program on the KUKA-Controller, change to the Matlab-environment on the Matlab-PC.
- Change to the directory KUKA-KRL-TOOLBOX-MATLAB and execute the m-Script DEMO.m to perform a first operation test.

- If the commissioning was successful, you should receive the actual robot position in cartesian coords on the Matlab-Prompt.
KUKA-KRL-Tbx-Installation Scilab
The process of installation starts with the configuration of the Interpreter-Program within the Scilab environment. The Interpreter-Program will run on the KUKA-Controller later on. It is responsible for the identification and execution of commands that are transmitted by the PC.
- Change to the directory KUKA-KRL-INTERPRETER-KONFIGURATION and execute the sci-Function CONFIG_INTERPRETER.sci.
NOTE: Employ Scilab version 5.1 or higher for using KUKA-KRL-Toolbox.
- Use the options (4) and (5), to configure the ComPort for serial communication. For detailed informationen concerning the interface name (default :SER_2) and the related data-parameter (default $DATA_SER2) please refer to the KUKA-manual: "CREAD CWRITE". Change the interrupt-priority by option (3), if applicable. (By the way, you can choose an option by typing the related number into the command line.)
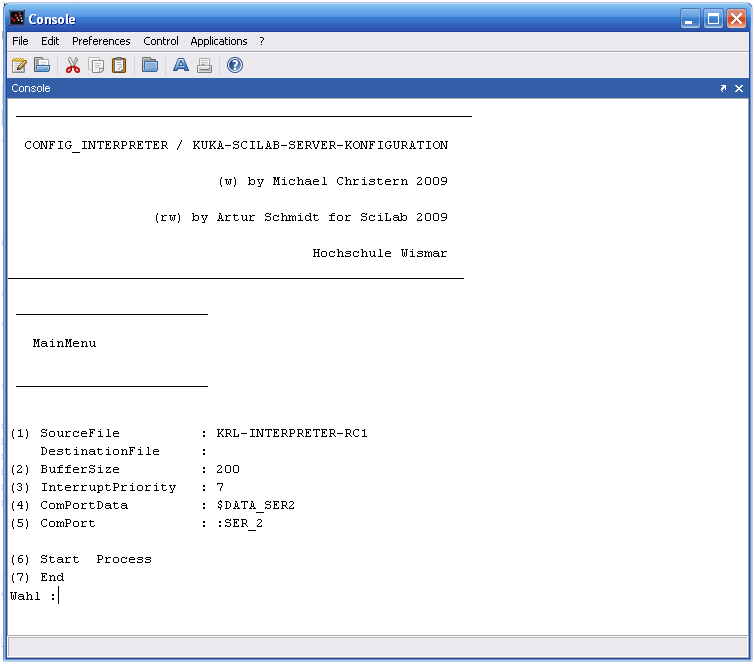
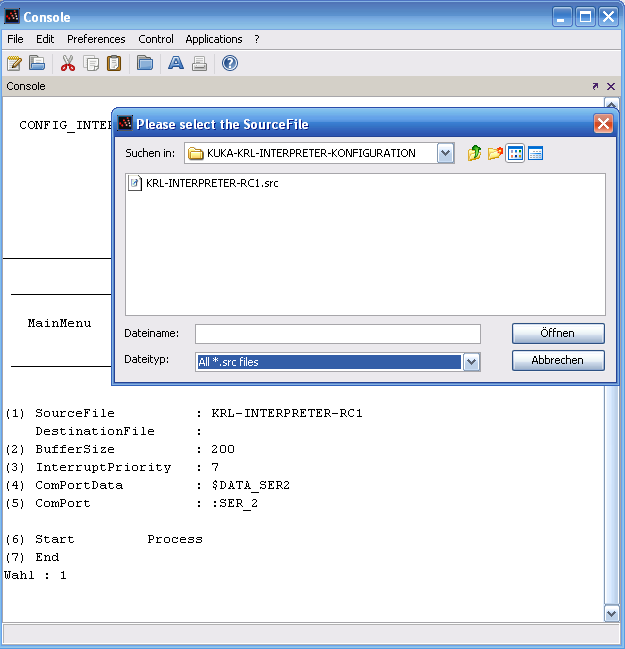
- Choose the source file in the directory KUKA-KRL-INTERPRETER-KONFIGURATION by option (1) (default KRL-INTERPRETER-RC1.src). The destination file is created automatically in the same folder. It is named KR3SCI-SERVER-RC1 by default.
- Subsequently, you can start the process of configuration by option (6). The "placeholder variables" for BufferSize, InterruptPriority, ComPortData, ComPort in the source file KRL-INTERPRETER-RC1 are replaced by the reassigned values and are written to the destination file afterwards.
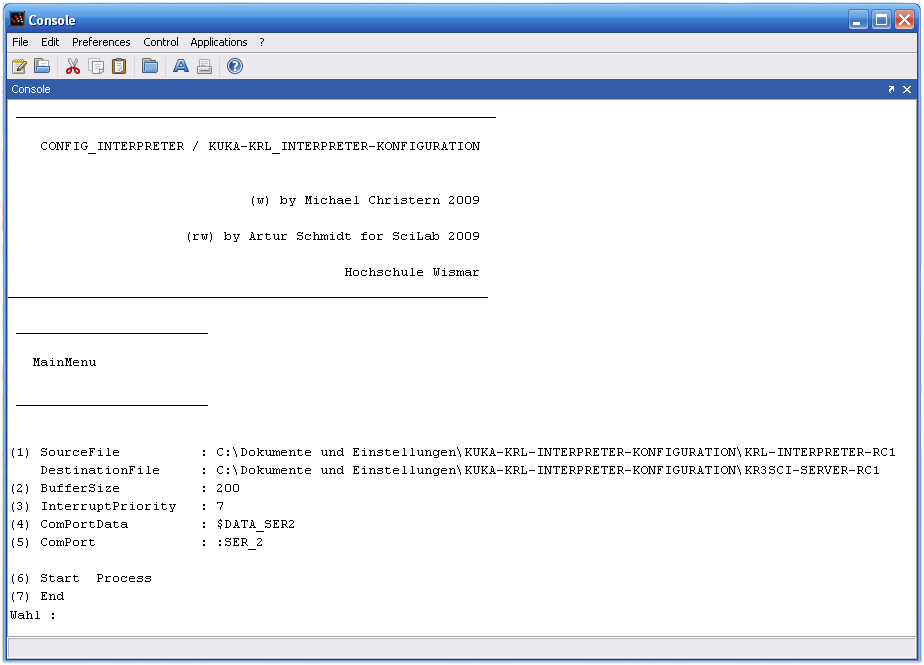
- Now there are two additional files in your current Scilab directory: KR3SCI-SERVER-RC1.dat, KR3SCI-SERVER-RC1.src in this case. Finally you terminate the process of configuration by option (7).
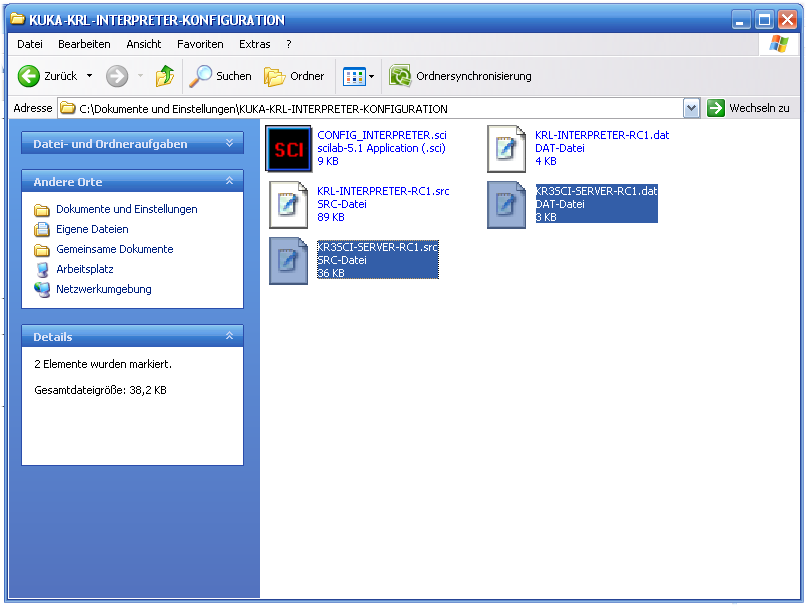
- The files KR3SCI-SERVER-RC1.dat, KR3SCI-SERVER-RC1.src form a "KRL module", that is used as Interpreter-Program. Subsequently this Interpreter-Program is commissioned on the KUKA-Controller (KRC). Therefore copy both files on a storage device.
- Switch on the the KUKA-Controller and start the KUKA programming environment (standard software KR C). Change to the user group Expert. Create a folder with the name of Interpreter-Program KR3SCI-SERVER-RC1. Copy the files KR3SCI-SERVER-RC1.dat, KR3SCI-SERVER-RC1.src from the storage device into this folder.
NOTE: The copy process has to be executed within the KUKA programming environment.
- "Select" the *.src-Datei: KR3SCI-SERVER-RC1.src. Start the Interpreter-Program in the execution mode "GO", that means all program statements are executed until the end of program is reached, without stopping. Now the Interpreter-Program is ready to receive instructions from Scilab-PC.
Operation-Test Scilab
- After commissioning the Interpreter-Program on the KUKA-Controller, change to the Scilab-environment on the Scilab-PC.
- Change to the directory KUKA-KRL-TOOLBOX-SCILAB and execute the sce-File Kuka.sce.
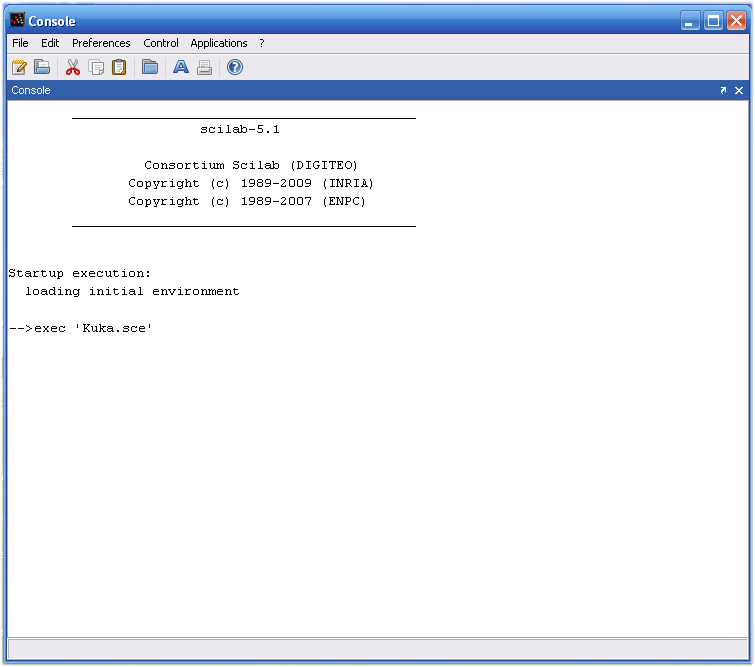
- Now the Scilab-KRL-Toolbox was loaded and is ready to use. Execute the Scilab-Script Demo.sce to perform a first operation test.
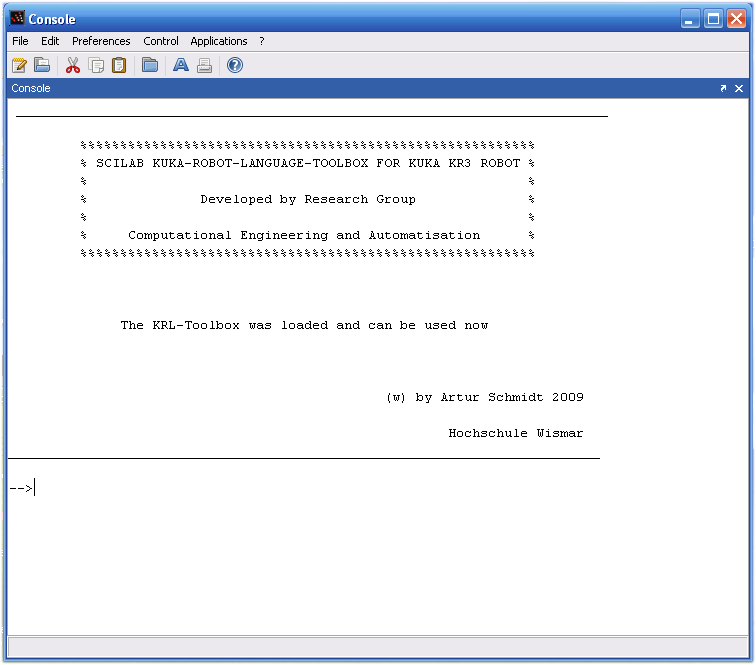
- If the commissioning was successful, you should receive the actual robot position in cartesian coords on the Scilab-Prompt.
Disclaimer of warranty
The research group CEA assumes no liability for accuracy and completeness of the provided information. This refers to damages of substantial or ideational form, that are caused by the usage of the KUKA-KRL-Toolbox. By reason that the KUKA-KRL-Toolbox is constantly evolving there is no warranty for operability.
June 2009, G. Maletzki