Installation KUKA-KRL-Toolbox
Inhalt
Notwendige Vorbereitungen
Erweitern Sie die KUKA-Standardkomponenten um einen zusätzlichen PC, bevor Sie mit der Installation der KUKA-KRL-Tbx beginnen. Verbinden Sie Ihren PC über die serielle Schnittstelle mit dem KUKA-Controller. Verwenden Sie dafür ein Nullmodem-Kabel (Crossoverkabel). Detaillierte Informationen für die Konfiguration der seriellen Schnittstelle seitens KUKA-Controller entnehmen Sie bitte dem KUKA-Manual: "CREAD CWRITE".
KUKA-KRL-Tbx-Installation Matlab®
Der Installationsprozess beginnt mit der Konfiguration des Interpreter-Programms innerhalb der Matlab-Umgebung. Das Interpreter-Programm läuft anschließend auf dem KUKA Controller und ist für die Identifikation und Ausführung von Anweisungen verantwortlich, die vom PC gesendet werden.
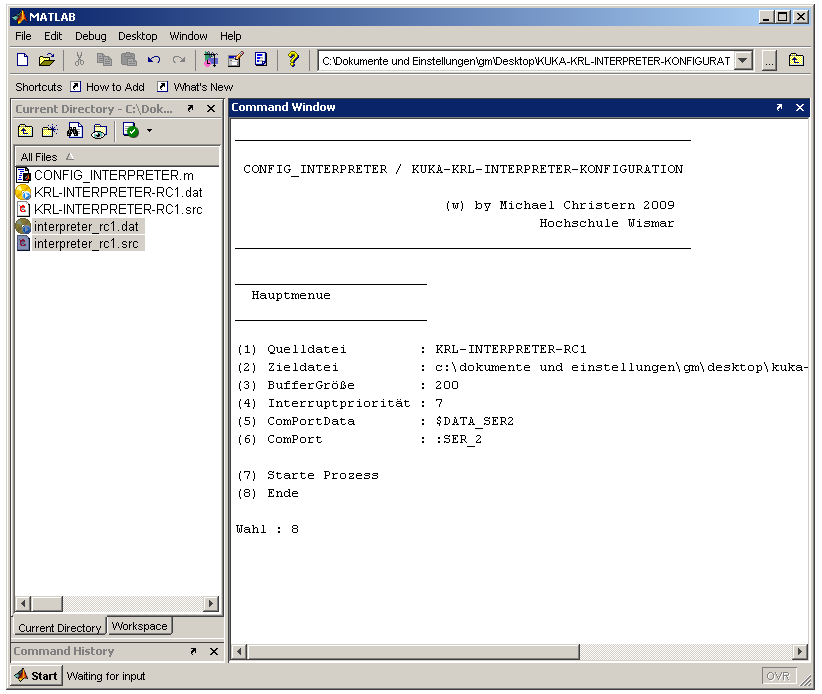
- Wechseln Sie in das Verzeichnis KUKA-KRL-INTERPRETER-KONFIGURATION und führen Sie anschließend die m-Function CONFIG_INTERPRETER.m aus.
- Nutzen Sie die Option (5) und (6), um den ComPort für die serielle Kommunikation zu konfigurieren. Detaillierte Informationen bzgl. des Schnittstellennamens (Standard :SER_2) und der zugehörigen Datensystemvariablen (Standard $DATA_SER2) entnehmen Sie bitte dem KUKA-Manual: "CREAD CWRITE". Ändern Sie gegebenenfalls die Interrupt-Priorität über die Option (4).
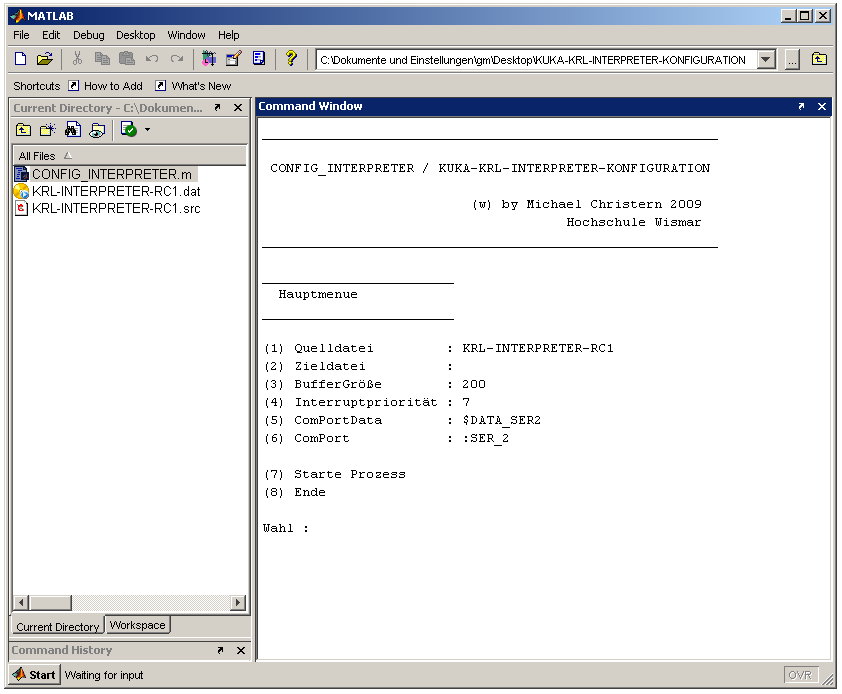
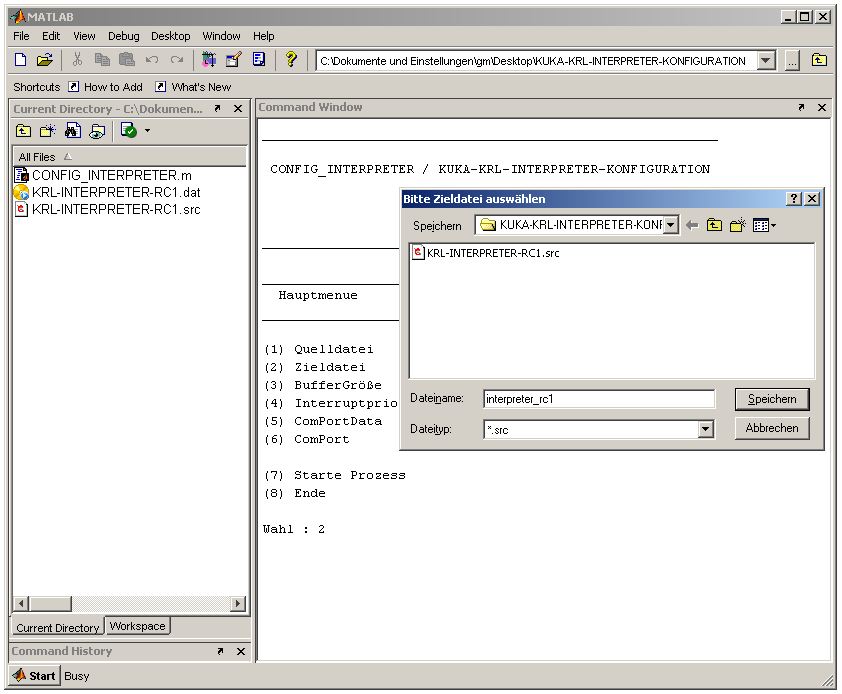
- Definieren Sie mittels Option (2) einen Dateinamen für die Zieldatei.
- Anschließend starten Sie mittels Option (7) den Konfigurationsprozess. In der Quelldatei KRL-INTERPRETER-RC1 werden nun die "Platzhaltervariablen" für BufferGöße, Interruptpriorität, ComPortData, ComPort durch die zugewiesenen Größen ersetzt und in die Zieldatei geschrieben.
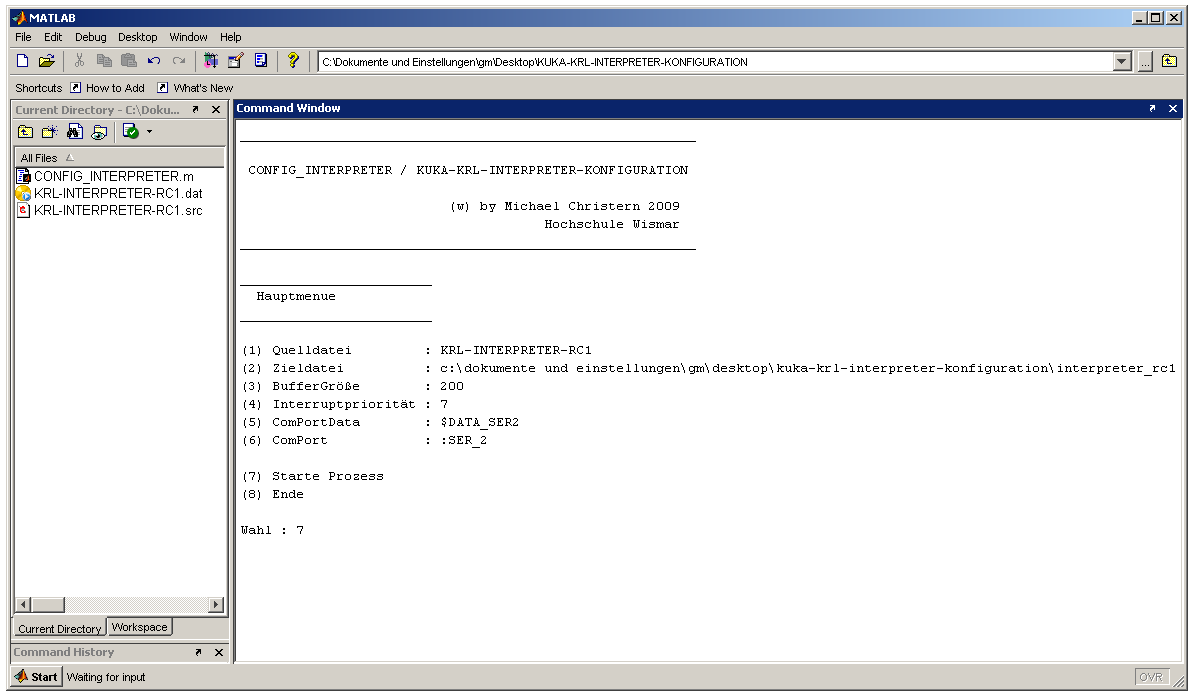
- In Ihrem aktuellen Matlab-Verzeichnis sind nun zwei zusätzliche Dateien: interpreter_rc1.dat, interpreter_rc1.src hinzugefügt worden. Abschließend beenden Sie den Konfigurationsprozess mit der Option (8).
- Die Dateien interpreter_rc1.dat, interpreter_rc1.src bilden ein KRL-Modul und können als Interpreter-Programm auf dem KUKA-Controller (KRC) in Betrieb genommen werden. Kopieren Sie die beiden Dateien zunächst auf einen Wechseldatenträger.
- Schalten Sie Ihren KUKA-Controller ein und starten Sie die KUKA-Programmieroberfläche (Standardsoftware KR C). Welchseln Sie in die Benutzergruppe Experte. Im Anschluß legen Sie einen Ordner mit dem Namen des Interpreter-Programms interpreter_rc1 an. Kopieren Sie die Dateien interpreter_rc1.dat, interpreter_rc1.src vom Wechseldatenträger in diesen Ordner.
WICHTIG: Der Kopiervorgang muss in der KUKA-Programmieroberfläche ausgeführt werden.
- Nun können Sie die *.src-Datei: interpreter_rc1.src anwählen. Starten Sie den Interpreter mit der Programmablaufart GO, d.h. alle Anweisungen werden ohne STOP bis zum Programmende bearbeitet. Das Interpreter-Programm ist nun bereit, Anweisungen vom Matlab-PC zu empfangen.
Funktionstest Matlab®
- Nachdem Sie das Interpreter-Programm auf dem KUKA-Controller in Betrieb genommen haben, wechseln Sie in die Matlab-Umgebung auf dem Matlab-PC.
- Wechseln Sie in das Verzeichnis KUKA-KRL-TOOLBOX-MATLAB und führen Sie anschließend das m-Script DEMO.m aus, um einen ersten Funktionstest durchzuführen.

- Bei erfolgreicher Inbetriebnahme sollten Sie am Matlab-Prompt die aktuelle Roboterposition in kartesischen Koordinaten empfangen.
KUKA-KRL-Tbx-Installation Scilab
Der Installationsprozess beginnt mit der Konfiguration des Interpreter-Programms innerhalb der Scilab-Umgebung. Das Interpreter-Programm läuft anschließend auf dem KUKA Controller und ist für die Identifikation und Ausführung von Anweisungen verantwortlich, die vom PC gesendet werden.
- Wechseln Sie in das Verzeichnis KUKA-KRL-INTERPRETER-KONFIGURATION und führen Sie anschließend die sci-Function CONFIG_INTERPRETER.sci aus.
WICHTIG: Für die Verwendung der KUKA-KRL-Toolbox nutzen Sie bitte Scilab5.1 oder höher.
- Nutzen Sie die Option (4) und (5), um den ComPort für die serielle Kommunikation zu konfigurieren. Detaillierte Informationen bzgl. des Schnittstellennamens (Standard :SER_2) und der zugehörigen Datensystemvariablen (Standard $DATA_SER2) entnehmen Sie bitte dem KUKA-Manual: "CREAD CWRITE". Ändern Sie gegebenenfalls die Interrupt-Priorität über die Option (3).
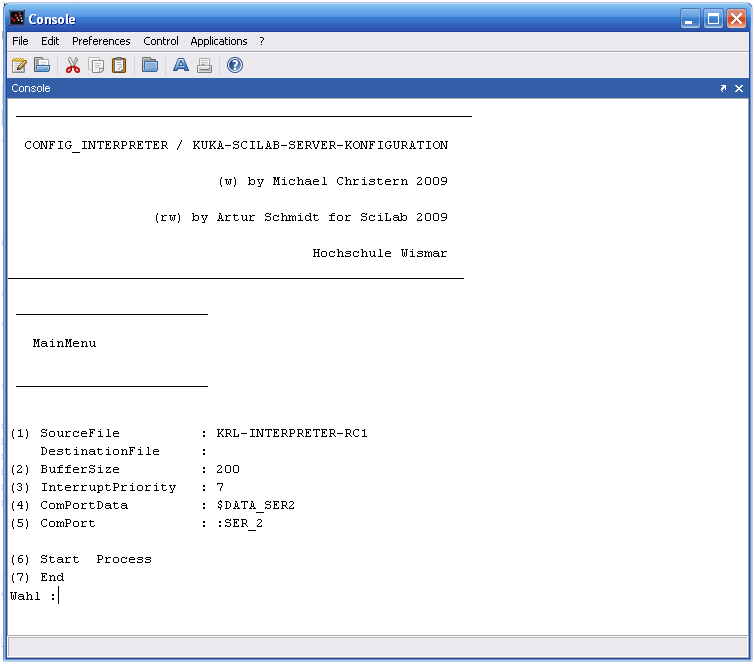
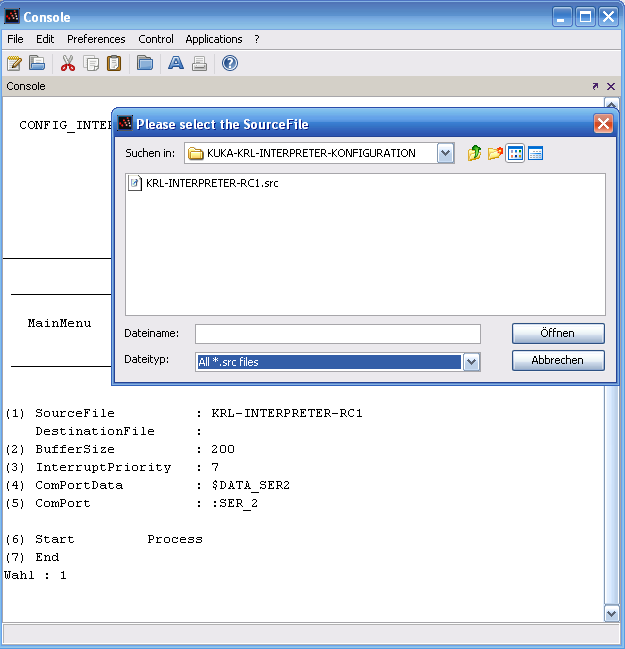
- Wählen Sie mittels Option (1) die Quelldatei aus dem Verzeichnis KUKA-KRL-INTERPRETER-KONFIGURATION aus (Standard KRL-INTERPRETER-RC1.src). Die Zieldatei wird automatisch im selben Ordner angelegt und hat standardmäßig den Namen KR3SCI-SERVER-RC1.
- Anschließend starten Sie mittels Option (6) den Konfigurationsprozess. In der Quelldatei KRL-INTERPRETER-RC1 werden nun die "Platzhaltervariablen" für BufferSize, InterruptPriority, ComPortData, ComPort durch die zugewiesenen Größen ersetzt und in die Zieldatei geschrieben.
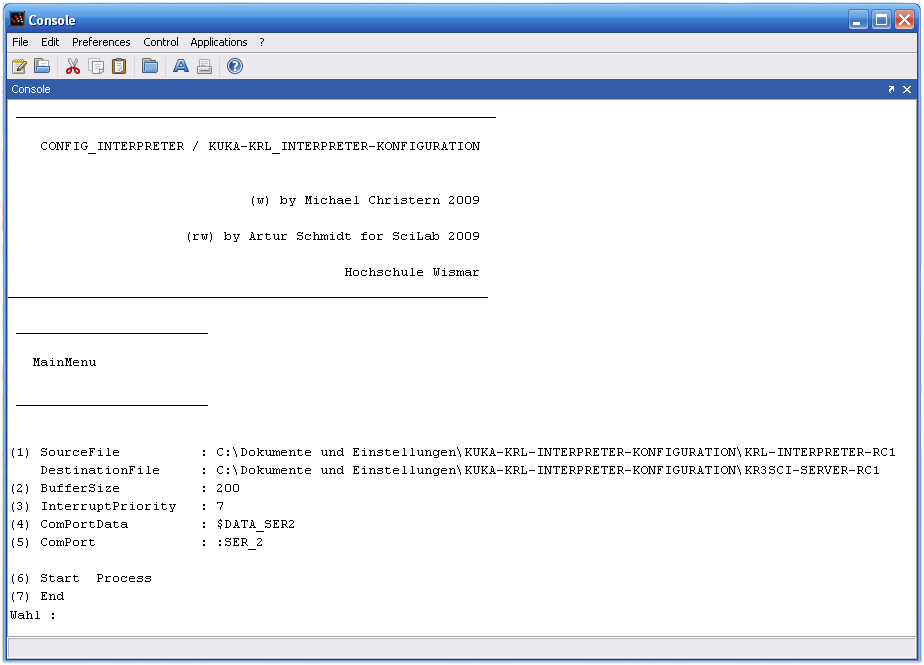
- In Ihrem aktuellen Scilab-Verzeichnis sind nun zwei zusätzliche Dateien: KR3SCI-SERVER-RC1.dat, KR3SCI-SERVER-RC1.src hinzugefügt worden. Abschließend beenden Sie den Konfigurationsprozess mit der Option (7).
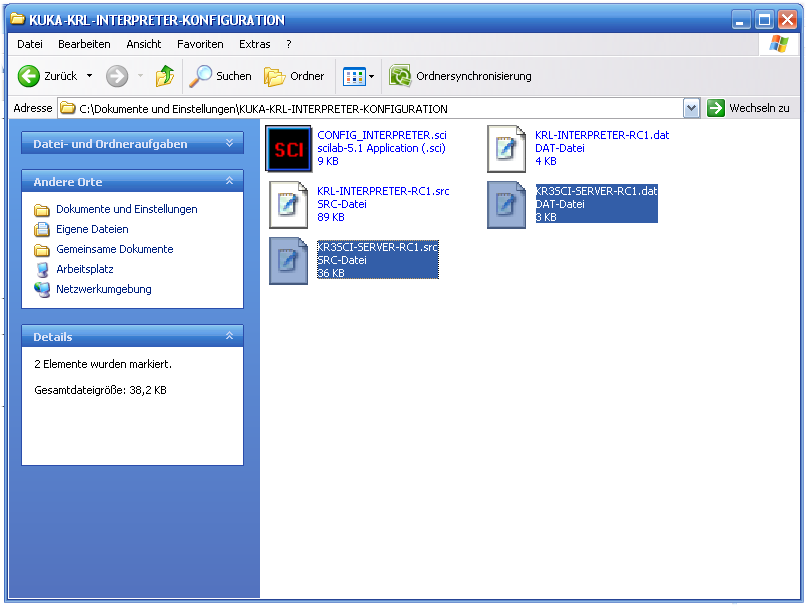
- Die Dateien KR3SCI-SERVER-RC1.dat, KR3SCI-SERVER-RC1.src bilden ein KRL-Modul und können als Interpreter-Programm auf dem KUKA-Controller (KRC) in Betrieb genommen werden. Kopieren Sie die beiden Dateien zunächst auf einen Wechseldatenträger.
- Schalten Sie Ihren KUKA-Controller ein und starten Sie die KUKA-Programmieroberfläche (Standardsoftware KR C). Welchseln Sie in die Benutzergruppe Experte. Im Anschluß legen Sie einen Ordner mit dem Namen des Interpreter-Programms KR3SCI-SERVER-RC1 an. Kopieren Sie die Dateien KR3SCI-SERVER-RC1.dat, KR3SCI-SERVER-RC1.src vom Wechseldatenträger in diesen Ordner.
WICHTIG: Der Kopiervorgang muss in der KUKA-Programmieroberfläche ausgeführt werden.
- Nun können Sie die *.src-Datei: KR3SCI-SERVER-RC1.src anwählen. Starten Sie den Interpreter mit der Programmablaufart GO, d.h. alle Anweisungen werden ohne STOP bis zum Programmende bearbeitet. Das Interpreter-Programm ist nun bereit, Anweisungen vom Scilab-PC zu empfangen.
Funktionstest Scilab
- Nachdem Sie das Interpreter-Programm auf dem KUKA-Controller in Betrieb genommen haben, wechseln Sie in die Scilab-Umgebung auf dem Scilab-PC.
- Wechseln Sie nun in das Verzeichnis KUKA-KRL-TOOLBOX-SCILAB und laden Sie das sce-File Kuka.sce.
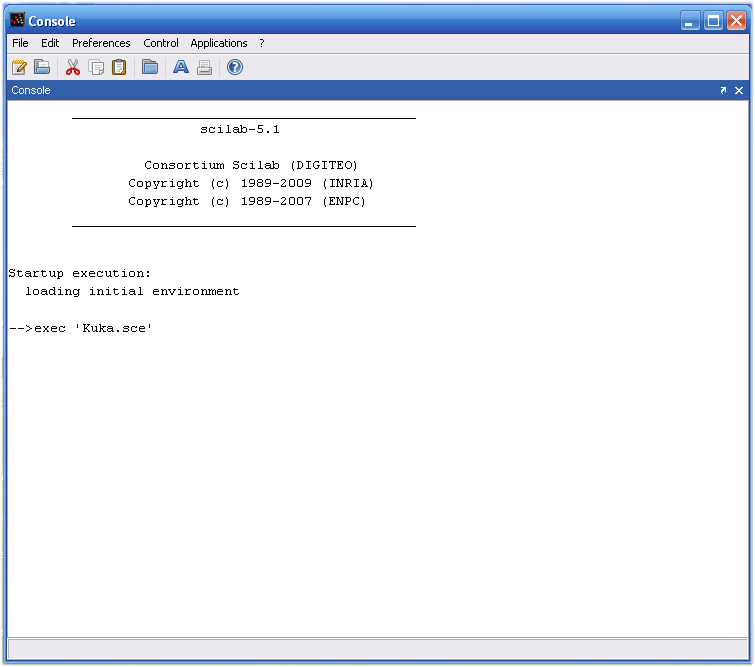
- Die Scilab-KRL-Toolbox wurde nun geladen und kann anschließend verwendet werden. Führen Sie das Scilab-Script Demo.sce aus, um einen ersten Funktionstest durchzuführen.
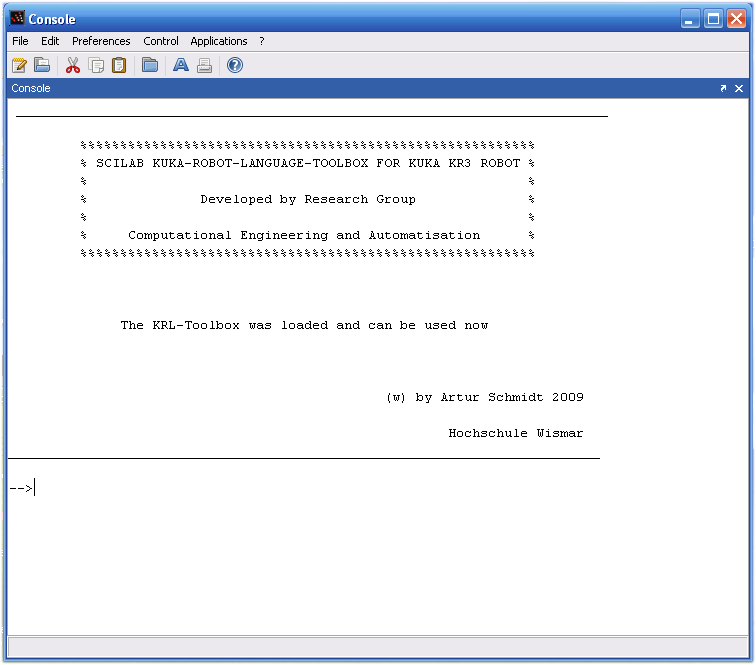
- Bei erfolgreicher Inbetriebnahme sollten Sie am Scilab-Prompt die aktuelle Roboterposition in kartesischen Koordinaten empfangen.
Haftungsausschluss
Die Forschungsgruppe CEA übernimmt keine Haftung für die inhaltliche Richtigkeit sowie für die Vollständigkeit der bereitgestellten Informationen. Dies bezieht sich auf eventuelle Schäden materieller oder ideeller Art Dritter, die durch die Nutzung der KUKA-KRL-Toolbox verursacht wurden. Da die KUKA-KRL-Toolbox stetig weiterentwickelt wird, kann auch keine Garantie bzgl. der Funktionsfähigkeit gewährleistet werden.
Juni 2009, G. Maletzki